Tous les meilleurs films de science-fiction en ont et ils pourraient devenir nos futurs explorateurs spatiaux automatisés. Cela signifie que, en particulier avec des missions opérant loin de la Terre (comme les Phoenix Mars Lander et Mars Expedition Rovers), des tâches très simples et banales peuvent prendre des heures, voire des jours. L’une des principales raisons qui soutiennent l’exploration habitée de l’espace est qu’une science très complexe peut être menée très rapidement (après tout, les astronautes sont humain et de nombreuses opérations robotiques qui prennent des semaines peuvent être réalisées en quelques secondes). Mais disons si nos explorateurs robotiques avaient un degré élevé d'automatisation? Dire s'ils peuvent rompre l'exigence de la contribution humaine et effectuer des tâches avec un raisonnement intelligent? Alors que la technologie robotique et informatique gagne en sophistication, un scientifique de Caltech pense que l'exploration spatiale par l'intelligence artificielle est plus proche que nous ne le pensons…
Je me souviens avoir regardé le début de Star Wars: l'Empire contre-attaque pensant que c'était si injuste que Dark Vador et ses semblables avaient accès à des droïdes d'exploration spatiale intelligents qui pouvaient voler autour de la galaxie, atterrir sur des mondes extraterrestres et rechercher automatiquement les rebelles sur Hoth (diriger la flotte de combat vers la lune glacée, créant l'un des les séquences de bataille de science-fiction les plus célèbres et les plus atmosphériques de l'histoire du cinéma. À mon avis au moins). Mais disons que si nous pouvions construire de tels «droïdes» (en fait, droïde est une bonne description de ces explorateurs spatiaux, définis comme des «robots conscients de soi») qui pourraient être envoyés dans l'espace pour explorer et faire rapport au contrôle de mission sans dépendre des instructions de la Terre?
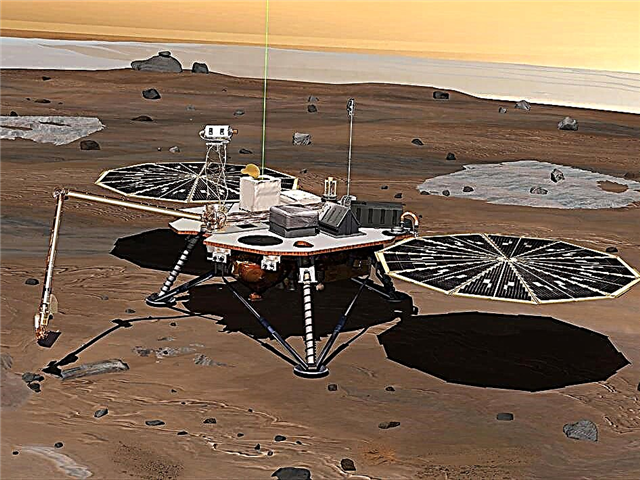
Wolfgang Fink, physicien et chercheur à Caltech, pense que l'exploration robotique de l'espace prendra toujours la tête, et inversera même le besoin de missions habitées. "L'exploration robotique sera probablement toujours le précurseur de l'exploration humaine de l'espace lointain», Dit-il dans une interview avec Sharon Gaudin. "Nous n'avons pas encore débarqué un être humain sur Mars mais nous avons un robot là-bas maintenant. En ce sens, il est beaucoup plus facile d'envoyer un explorateur robotique. Quand vous pouvez sortir l'humain de la boucle, cela devient très excitant.”
Alors que Fink est encouragé par les progrès réalisés par des missions telles que Phoenix et son bras robotique, il tient à souligner que le lien entre l'homme et le robot doit être supprimé, permettant ainsi aux robots de prendre leurs propres décisions sur ce que la science doit être transportée. en dehors. En référence au bras robotique de Phoenix, il a déclaré:Les bras sont les outils, mais il s'agit de l'intention de déplacer les bras. C’est ce que nous recherchons. Pour [faire en sorte que le robot] sache que quelque chose là-bas est intéressant et c'est là où il doit aller, puis aller en chercher un échantillon. C’est ce que nous recherchons. Vous voulez vous débarrasser du joystick, en d'autres termes. Vous voulez que le système prenne le contrôle de lui-même, puis utilise essentiellement ses propres outils pour explorer.”

L'attribut clé que les robots doivent posséder est la capacité de reconnaître quelque chose d'intérêt, comme un rocher ou un cratère, quelque chose qu'un esprit humain verrait comme une opportunité scientifique. Chez Caltech, Fink et d'autres travaillent sur des programmes qui utilisent des images pour les robots afin de distinguer les couleurs, les textures, les formes et les obstacles. Une fois que l'intelligence artificielle a la capacité de le faire, si la programmation est suffisamment complexe, le robot peut remarquer quelque chose qui n'est pas à sa place, ou une région qui mérite d'être étudiée (comme un patch étrangement coloré de régolithe de Mars qu'un robot de Mars décidera de chercher profondément).
Comme vous vous en doutez, le logiciel est en cours de test et les scientifiques de Caltech commencent à l'essayer sur les fonctions de navigation d'un mobile. Cependant, la prise de décision robotique est actuellement très basique, mais la NASA s'intéresse vivement au travail de Fink. Par exemple, en 2017, la NASA a l'intention d'envoyer une mission robotique à Titan, l'une des lunes de Saturne. Selon toute probabilité, la lune sera explorée par un véhicule de type ballon. Cependant, il ne serait pas pratique qu'un tel véhicule dépende des commandes envoyées depuis la Terre (car il faudrait plus d'une heure pour que les communications transmettent sur cette distance), il faudrait donc un certain degré d'automatisation intégré au des décisions si rapides peuvent être prises dans un environnement dynamique tel que l'atmosphère de Titan.
Bien que tout cela soit intéressant et nécessaire, il y aura toujours un désir humain fondamental d'explorer l'espace via des missions habitées, bien qu'un certain degré de conscience de soi puisse être exigé de nos explorateurs robotiques alors qu'ils effectuent des voyages de reconnaissance avant de faire le voyage ...
Source: PC World