Crédit d'image: ISRO
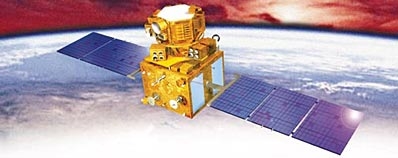
Une fusée PSLV indienne a décollé aujourd'hui du centre spatial Satish Dhawan transportant le satellite de télédétection IRS-P6 sur une orbite polaire haute de 821 km. L'IRS-P6 est le satellite de télédétection le plus avancé construit par l'Organisation indienne de recherche spatiale (ISRO); il surveillera principalement les ressources naturelles, comme l'eau, l'agriculture et collectera des données sur la gestion des terres.
Dans son huitième vol effectué depuis le centre spatial Satish Dhawan (SDSC), SHAR, Sriharikota, aujourd'hui (17 octobre 2003), le lanceur de satellite polaire ISRO, PSLV-C5, a lancé avec succès le satellite indien de télédétection RESOURCESAT-1 (IRS) -P6) sur une orbite synchrone solaire (SSO) polaire haute de 821 km. Le RESOURCESAT-1 de 1 360 kg est le satellite de télédétection le plus avancé et le plus lourd lancé à ce jour par l'ISRO. Le PSLV constitue un élément important du système de bout en bout créé par l'ISRO pour la planification et la gestion des ressources naturelles.
Le PSLV-C5 a décollé de SDSC, SHAR, Sriharikota à 10 h 22 avec l'allumage du premier étage de base et de quatre moteurs à sangle. Les deux autres moteurs à sangle du premier étage ont été allumés 25 secondes après le décollage. Après avoir traversé les événements de vol prévus, y compris la séparation des moteurs à sangle au sol, la séparation des moteurs à sangle à air et du premier étage, l'allumage du deuxième étage, la séparation du carénage de la charge utile après que le véhicule a franchi le atmosphère dense, séparation du deuxième étage, allumage du troisième étage, séparation du troisième étage, allumage du quatrième étage et coupure du quatrième étage, RESOUCESAT-1 a été systématiquement injecté en orbite 1080 secondes après le décollage.
RESOURCESAT-1 a été séparé après une réorientation appropriée de la combinaison de baies d'équipement de quatrième étage pour éviter toute collision avec le satellite. RESOURCESAT-1 a été placé dans l'orbite synchrone du soleil polaire (SSO) à une altitude de 821 km avec une inclinaison de 98,76 degrés par rapport à l'équateur.
À propos de PSLV
Il convient de noter que le PSLV a été conçu et développé par l'ISRO pour placer des satellites de télédétection indiens de classe 1 000 kg sur une orbite polaire synchrone solaire (SSO). Depuis son premier vol réussi en octobre 1994, la capacité du PSLV est passée de 850 kg à 1 400 kg actuellement en 820 km en orbite synchrone solaire. Le PSLV a également démontré la capacité de lancement de plusieurs satellites. Jusqu'à présent, elle a lancé sept satellites indiens ainsi que quatre petits satellites pour des clients internationaux.
L'amélioration de la capacité de charge utile du PSLV au cours des vols successifs a été obtenue par plusieurs moyens - augmentation de la charge propulsive du moteur à propergol solide du premier étage et des moteurs à propergol liquide des deuxième et quatrième étages, amélioration des performances du moteur du troisième étage en optimisant boîtier de moteur et charge propulsive améliorée et utilisant un adaptateur de charge utile en composite de carbone. La séquence d'allumage des moteurs à sangle a également été modifiée, passant de deux éclairés au sol et quatre éclairés à l'air à la séquence actuelle de quatre éclairés au sol et de deux éclairés à l'air.
Dans le PSLV-C5, l'adaptateur métallique du troisième étage a été remplacé par celui construit avec des composites en carbone. En outre, le deuxième étage de propergol liquide a été utilisé à une pression de chambre plus élevée pour de meilleures performances.
Dans sa configuration actuelle, le PSLV de 44,4 mètres de haut et 294 tonnes comporte quatre étages utilisant alternativement des systèmes de propulsion solide et liquide. La première étape est l'un des plus grands propulseurs à propergol solide au monde et transporte 138 tonnes de propergol à terminaison hydroxyle polybutadiène (HTPB). Il a un diamètre de 2,8 m. Le carter moteur est en acier maraging. Le surpresseur développe une poussée maximale d'environ 4 762 kN. Six moteurs à sangle, dont quatre sont allumés au sol, augmentent la poussée du premier étage. Chacun de ces moteurs à sangle propulseur solide transporte neuf tonnes de propergol solide et produit une poussée de 645 kN.
Le deuxième étage utilise un moteur Vikas de construction indigène et transporte 41,5 tonnes de propulseur liquide - UH25 comme carburant et du tétroxyde d'azote (N2O4) comme comburant. Il génère une poussée maximale d'environ 800 kN.
La troisième étape utilise 7,6 tonnes de propergol solide à base de HTPB et produit une poussée maximale de 246 kN. Son carter moteur est en fibre de polyaramide. Le quatrième et le stade terminal du PSLV ont une configuration à deux moteurs utilisant un propulseur liquide. Avec une charge propulsive de 2,5 tonnes (mono-méthylhydrazine et oxydes mixtes d'azote), chacun de ces moteurs génère une poussée maximale de 7,3 kN.
Le carénage à bulbe métallique de 3,2 m de diamètre de PSLV est de construction isogrille et protège l'engin spatial pendant le régime atmosphérique du vol. PSLV utilise un grand nombre de systèmes auxiliaires d'étage pour la séparation d'étage, la séparation et le largage de carénage de charge utile, etc.
Le système de contrôle PSLV comprend: a) le premier étage; Commande de vecteur de poussée d'injection secondaire (SITVC) pour le tangage et le lacet, propulseurs de commande de réaction pour le roulis b) Deuxième étage; Cardan de moteur pour le tangage et le lacet et, moteur de commande de réaction de gaz chaud pour la commande de roulis c) Troisième étage; buse flexible pour le tangage et le lacet et PS-4 RCS pour le contrôle du roulis et d) Quatrième étage; Cardan moteur pour tangage, lacet et roulis et RCS on-off pour le contrôle pendant la phase côtière.
Le système de navigation inertielle dans la baie d'équipement, qui est situé au sommet du quatrième étage, guide le véhicule du décollage à l'injection de l'engin spatial en orbite. Le véhicule est équipé d'instruments pour surveiller les performances du véhicule pendant le vol. La télémétrie PCM en bande S et les transpondeurs en bande C répondent à cette exigence. Le système de suivi fournit des informations en temps réel pour la sécurité des vols et pour la détermination préliminaire de l'orbite une fois le satellite injecté en orbite.
Le Vikram Sarabhai Space Center (VSSC), Thiruvananthapuram, a conçu et développé le PSLV. L'unité des systèmes inertiels ISRO (IISU) de Thiruvananthapuram a développé les systèmes inertiels du véhicule. Le Centre des systèmes de propulsion liquide, également à Thiruvananthapuram, a développé les étapes de propulsion liquide pour les deuxième et quatrième étapes du PSLV ainsi que les systèmes de contrôle de la réaction. Le Centre Spatial Satish Dhawan (SDSC), SHAR a traité les moteurs solides et effectué les opérations de lancement. ISTRAC a fourni un support de télémétrie, de suivi et de commande.
Avec sept lancements successifs réussis, le PSLV s'est révélé être un véhicule fiable pour le lancement de satellites de télédétection indiens. En outre, il a été utilisé pour lancer un satellite géosynchrone, KALPANA-1. L'ISRO a proposé d'utiliser le PSLV pour la première mission sans pilote de l'Inde sur la lune, Chandrayaan-1.
RESOURCESAT-1 comporte trois caméras comme suit:
* Un auto-scanner à imagerie linéaire haute résolution (LISS-4) fonctionnant dans trois bandes spectrales dans la région visible et proche infrarouge (VNIR) avec une résolution spatiale de 5,8 mètres et orientable jusqu'à + 26 degrés sur toute la piste pour obtenir des images stéréoscopiques et atteindre cinq jours revoir la capacité
* Un LISS-3 de résolution moyenne fonctionnant dans trois bandes spectrales en VNIR et une en bande infrarouge à ondes courtes (SWIR) avec une résolution spatiale de 23,5 mètres
* Un capteur avancé à champ large (AWiFS) fonctionnant dans trois bandes spectrales en VNIR et une bande en SWIR avec une résolution spatiale de 56 mètres.
RESOURCESAT-1 possède également un enregistreur à semi-conducteurs d'une capacité de 120 Giga Bits pour stocker les images prises par ses caméras qui peuvent être lues ultérieurement aux stations au sol.
Peu après son injection en orbite, les panneaux solaires à bord du RESOURCESAT-1 ont été déployés automatiquement pour générer l'énergie électrique nécessaire au satellite. D'autres opérations comme la stabilisation à trois axes sont en cours. La santé du satellite est surveillée en permanence depuis le centre de contrôle des engins spatiaux de Bangalore avec l'aide du réseau de stations ISTRAC à Bangalore, Lucknow, Maurice, Bearslake en Russie et Biak en Indonésie. D'autres opérations sur le satellite comme le trim de l'orbite, la vérification des différents sous-systèmes et enfin la mise sous tension des caméras seront effectuées dans les prochains jours.
Avec ISRO Satellite Center (ISAC), Bangalore, en tant que centre principal, RESOURCESAT-1 a été réalisé avec des contributions majeures du Space Applications Center (SAC), d'Ahmedabad, du Liquid Propulsion Systems Center (LPSC) à Bangalore et de l'ISRO Inertial Systems Unit (IISU). ), Thiruvananthapuram. ISTRAC est responsable de l'exploitation initiale et en orbite de RESOURCESAT-1. La station de réception des données de l'Agence nationale de télédétection (NRSA) à Shadnagar près de Hyderabad reçoit les données de RESOURCESAT-1.
Une fois mis en service, RESOURCESAT-1 continuera non seulement les services de l'IRS-1C et de l'IRS-1D, mais améliorera également les services de télédétection en fournissant des images avec une résolution spatiale améliorée et des bandes spectrales supplémentaires.
Source d'origine: communiqué de presse ISRO